 View 6DOF Collision Detection Movie
View 6DOF Collision Detection Movie
The following two papers and movie were generated as a result of my association with Hewlett Packard Labs as a Visting Scientist. If you have any questions about haptics applications, or I can be of assistance to your efforts, don't hesitate to contact me at Dennis@DennisHancock.com
View 6DOF Collision Detection Movie
 Richard Hart using my haptics system on his CNET national TV program The New Edge Richard Hart using my haptics system on his CNET national TV program The New Edge |
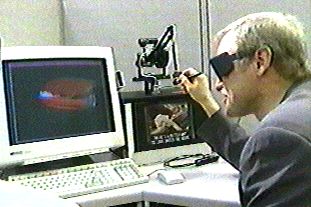
Bimodal Display in Operation. The operator stereoscopically views the Ford Mustang floating in front of the CRT and he is able to reach out, touch, and feel the car with his right hand. The tires feel rubbery, and the metal feels very hard. There are no restrictions where the operator can explore the car--outside, on the backside out of sight, or inside the engine compartment. |
I have been working since Feb 95 developing interactive graphics software that integrates both stereoscopic visualization of computer graphics images and haptics devices (or force feedback) into a bimodal display that allows the user to feel with his hands what he is looking at. Some people might recognize this as a definition of virtual reality, but I prefer to call it interactive graphics for two reasons: 1) bimodal displays are the next step in graphics, offering more functionality than the graphics only views used in conventional "virtual reality", and 2) there is an unfortunate association in the minds of many that virtual reality is for games and not suited as a capable computer tool. Hopefully, technical professionals will soon come to associate the term "interactive graphics" with a useful and serious computer tool to accomplish their work.
My work has focused on the computational aspects of haptics, i.e. real time collision detection and the computer hardware architectures required to do useful work. I'll leave the haptics development work to those special mechanical engineers out there who are so inclined to give us products like the Phantom, etc. Mechanical CAD is a natural application area of mine, starting with the VR work I did for NASA on the Hubble Space Telescope Rescue Mission. To date, I have used both the PerForce device from Cybernet and the Phantom from Sensable Technologies. The PerForce device is a fully 6 degree of freedom input/output device. It can be used with some success to implement wrenches. (In fact I developed a demonstration of a synthetic wrench which could be used to turn a hex headed bolt. This was shown in the HP booth at AutoFact 95 in Chicago.) The Phantom possesses a 6 degree of freedom input and outputs only the 3 linear degrees of freedom. (No torques can be output to the hand.) However, the Phantom is a superior mechanical device for many CAD applications. We showed the capability of bimodal displays for mechanical CAD in the HP booth at SIGGRAPH 96 in New Orleans using a Phantom.